English
English  German
German  Japanese
Japanese Gearchange Robot
Designed for remote, automated control of manual and auto transmissions, the gearchange robot enhances the capability of your driving robots, creating new testing possibilities.
Designed for remote, automated control of manual and auto transmissions, the gearchange robot enhances the capability of your driving robots, creating new testing possibilities.
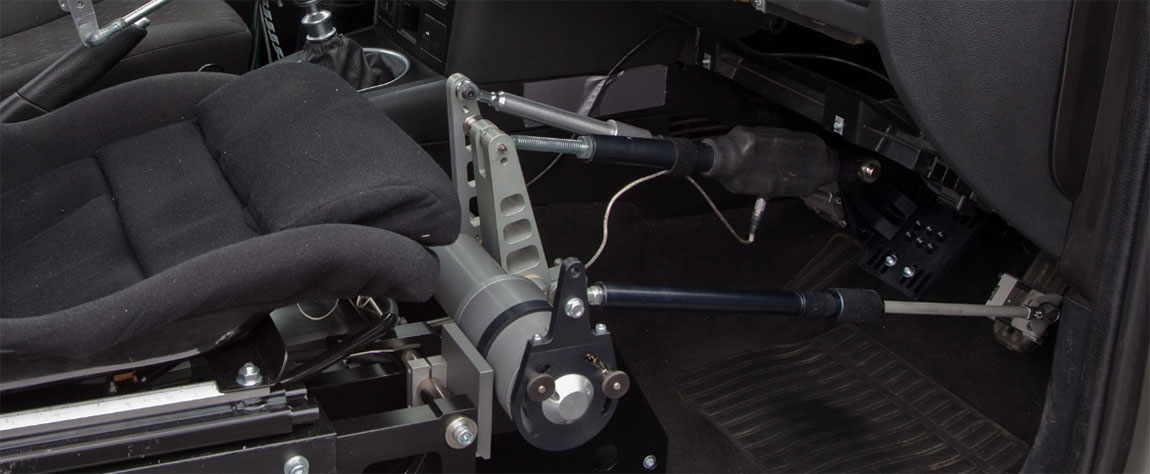
The Gearchange Robot enables automated control of a vehicle’s gear selector, enhancing options for driverless vehicle control. The robot can be used with automatic and manual gearboxes, selecting drive, reverse or individual gears. It can also be used for tests with a human driver onboard or for laboratory test work. Our RC software automatically coordinates the motion of the clutch, gear change, and throttle actuators to give smooth gear transitions. In vehicles with manual gearboxes, it can either act as a pseudo automatic selector – changing gear according to speed and throttle inputs, or it can follow a defined gear sequence.
With the Gearchange Robot’s ability to change gears in a manual or switch modes in an automatic, driverless robots can do even more of the work for you and complete more realistic test cycles. Some of the applications of gearshift robots include testing the effects of reversing into a pothole or other obstacles (reverse misuse), testing the durability of the gearbox and clutch by repeatedly reversing and turning on an incline (the ‘driveway test’), and testing the advanced driver assistance systems (ADAS) of manual vehicles that need to follow a predefined speed profile. By using gearchange robots, you can reduce the human intervention and error in your testing process and achieve more realistic and reliable results.

*Note: Stroke is typically limited by spherical joint angle. Larger linear strokes may be accommodated on vehicles where the angular movement of the gear lever is less
"*" indicates required fields
You need to load content from reCAPTCHA to submit the form. Please note that doing so will share data with third-party providers.
More InformationNotifications